Reaching the Limit in Autonomous Racing: Optimal Control versus Reinforcement Learning (SciRob 23)
RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion
Soft Actor-Critic Control of Robot Arm | Reinforcement Learning Tutorial
Optimal Control and Reinforcement Learning for Robot: A Survey
Learning Robot Control: From RL to Differential Simulation - (PhD Defense of Yunlong Song)
DDPG Control of a Quadruped with Reinforcement Learning Toolbox
強化学習:機械学習と制御理論の融合
Reinforcement Learning Series: Overview of Methods
Viewing Reinforcement Learning From the Point of View of Optimal Control
Lecture 8 - Optimization and Learning for Robot Control - Optimal control introduction
Lecture 1 - Optimization and Learning for Robot Control - Introduction, overview and motivations
Model-based Reinforcement Learning for Optimal Feedback Control of Switched Systems
Hybrid Control for Reinforcement Learning---the Hopper Benchmark
AI Seminar Series: Mo Chen, Optimal Control and Machine Learning in Robotics (Jan 8)
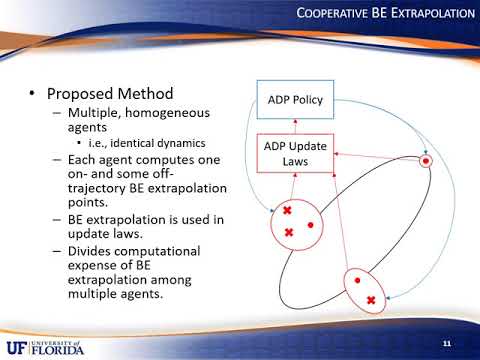
Cooperative Model-Based Reinforcement Learning for Approximate Optimal Tracking
アクター・クリティック・モデル予測制御(ICRA 2024 講演)
Learning Assembly Tasks in a Few Minutes by Combining Impedance Control and Reinforcement Learning
EXPLAINED: LLMs or Reinforcement Learning, for robot control?